|
| 1 | +# [Review of Image Descriptors](paper_notes/review_image_descriptors.md) |
| 2 | + |
| 3 | +_November 2019_ |
| 4 | + |
| 5 | +This review is based on the pyimagesearch course. |
| 6 | + |
| 7 | +#### Image Descriptors |
| 8 | +Image descriptors and feature vectors quantify and abstractly represent an image using only a list of numbers. |
| 9 | + |
| 10 | +- Feature vector: An abstraction of an image used to characterize and numerically quantify the contents of an image. Normally real, integer, or binary valued. Simply put, a feature vector is a list of numbers used to represent an image. |
| 11 | + - this feature can be passed down to image classifier or image search engine |
| 12 | +- Image descriptor: An image descriptor is an algorithm and methodology that governs how an input image is **globally** quantified and returns a feature vector abstractly representing the image contents. |
| 13 | + - they tend to be much simpler than feature descriptors |
| 14 | + - HoG, LBPs, Harlick texture |
| 15 | +- Feature descriptor: A feature descriptor is an algorithm and methodology that governs how an input region of an image is **locally** quantified. A feature descriptor accepts a single input image and returns **multiple feature vectors**. |
| 16 | + - SIFT, SURF, ORB, BRISK, BRIEF, and FREAK |
| 17 | + |
| 18 | +### Local features |
| 19 | +Keypoint detection and feature extraction: |
| 20 | +- keypoints are simply the (x, y)-coordinates of the interesting, salient regions of an image. |
| 21 | +- feature extraction is the process of extracting multiple feature vectors, one for each keypoint |
| 22 | +How to use multiple features per image? Keypoint matching or bag-of-visual-words. |
| 23 | + |
| 24 | +#### FAST (Features from Accelerated Segment Test) |
| 25 | +- Fast algorithm to detect corners |
| 26 | +- [Fusing Points and Lines for High Performance Tracking](https://gurus.pyimagesearch.com/wp-content/uploads/2015/06/rosten_2005.pdf) <kbd>ICCV 2005</kbd> |
| 27 | +- A test is performed for a feature at a pixel p by examining a circle of 16 pixels (a Bresenham circle of radius 3) surrounding p. A feature is detected at p if the intensities of at least 12 contiguous pixels are all above or all below the intensity of p by some threshold, t. |
| 28 | +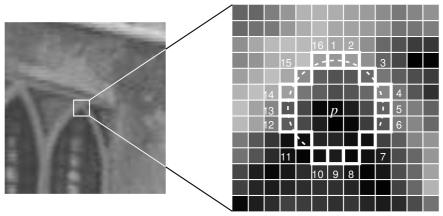 |
| 29 | +- [openCV example](https://docs.opencv.org/3.1.0/df/d0c/tutorial_py_fast.html#gsc.tab=0) |
| 30 | + |
| 31 | +#### SIFT |
0 commit comments